The Importances of Accurate Battery State of Charge (SOC) for Consumer
State of charge (SoC) is one of critical parmater of battery especially for the electric car consumer because their main concern during the drive is the remaining battery charge (usually shown in percentage units with 100% as fully charged and zero percent for no more electrical power left).
Dataset
Publicly available dataset is used and it can be fetched from following links:
- filename: 555_Dis_0p5C.csv, can be downloaded at https://data.mendeley.com/datasets/cp3473x7xv/3
Data assumptions based on the experiment description:
- Battery is charged after each test means the SoC is close to 1.0 or 0.99 before its discharged at 0.5c
- Battery cell capacity 3 ah
- Minimum Voltage 3.7v
- Maximum voltage 4.2v
- Dataset has been ordered based on the timestamp (ascending, older to newer) - means the first row shall have 0.99 SOC
Project Setup
Create new conda project
conda create --name battery-soc-kalman-filter python=3.12
activate the conda project
conda active battery-soc-kalman-filter
 Activate conda project using CLI
Activate conda project using CLI
install kernel for jupyer so the conda environment (dedicated python core libraries for that specific conda project) can be registered. Note that the package installation process must be done once the conda environment has been activated. Otherwise the kernel can’t be registered to jupyter notebook.
conda install ipykernel
 Install ipykernal through conda
Install ipykernal through conda
or it can also be installed using pip install
pip install ipykernel
once the installation of ipkernel is completed, execute following command to ensure the package installed properly on conda environment
pip list | grep "ipykernel"
it shown return the ipykernel library version on the console
 validate the installation status of ipykernel packages
validate the installation status of ipykernel packages
register the kernel
python -m ipykernel install --user --name battery-soc-kalman-filter --display-name "Python (battery-soc-kalman-filter)"

launch jupyter lab (dont forget to open new terminal without conda environment) and open it inside the conda environment folder source directory
jupyter lab
 Launch jupyterlab from console or cli
Launch jupyterlab from console or cli
now change the kernel into the newly created kernel (in this case, the kernel name is battery-soc-kalman-filter) then we’re all set.
 change to newly created kernel that use python 3.12
change to newly created kernel that use python 3.12
— python version 3.12 is recommended for data science as it has the most compatability with many data science packages like tensorflow, etc.
Kalman Filter Method
kalman filter is a method to estimate or predict or mesaure indirect battery SOC (state of charge) based on following telemtry parameter / tags
- voltage (v)
- current (ampere)
- temperature (celcius)
Utilizing python to estimate battery SOC using pandas
below are the steps to estimate battery SOC using several python libraries
Install pandas & matplotlib
Open a console with activated conda environment and execute following command
conda install pandas
 Install pandas to load and transform csv in dataframe
Install pandas to load and transform csv in dataframe
and below is the command to install matplotlib
pip install matplotlib
 Install matplotlib for data visualization
Install matplotlib for data visualization
Remove unnecessary data
Kalman filter method only utilize three battery tags/telemtry including voltage, current and temperature.
load csv into pandas dataframe
import pandas as pds
battery_telematics_dataset = "./dataset/555_Dis_0p5C.csv"
battery_telematics_dataframe = pds.read_csv(battery_telematics_dataset)
print(battery_telematics_dataframe.head())
remove unncesary column from the data frame and should only retain the battery telematics data
cleansed_telematics_dataframe : pds.DataFrame = battery_telematics_dataframe.drop(["Step", "Status", "Prog Time","Step Time", "Cycle", "Cycle Level", "Cnt", "Procedure", "WhAccu", "Capacity", "Unnamed: 14"], axis=1)
dischargetelematics_dataframe : pds.DataFrame = cleansed_telematics_dataframe[cleansed_telematics_dataframe["Current"] < 0].reset_index(drop=True)
print(dischargetelematics_dataframe.head())
Coulomb counting SOC estimation
Kalman filter method require a pre-estimated battery SOC because kalman filter is focus on re-evaluating and correct the pre-estimated SOC and often paired with coulomb counting method.
battery_cell_capacity = 3.0
sampling_time = 1/60
initial_soc = 0.99
def estimate_soc(prev_soc, current):
negated_current = -current
estimated_soc = prev_soc - (negated_current*sampling_time)/battery_cell_capacity
return estimated_soc
prev_soc = None
for i, row in dischargetelematics_dataframe.iterrows():
if i == 0:
dischargetelematics_dataframe.at[i, "soc_coulomb_counting"] = 0.99
prev_soc = 0.99
else:
now_soc = estimate_soc(prev_soc, row["Current"])
dischargetelematics_dataframe.at[i, "soc_coulomb_counting"] = now_soc
prev_soc = now_soc
print(dischargetelematics_dataframe.head())
Coulomb Counting SOC correction with kalman-filter
Kalman filter genrally has lower corrected soc value compared to kalman filter because it accomodate drifting (correction of cumulative error) parameter.
battery_voltage_min = 3.7
battery_voltage_max = 4.2
uncertainty = 1e-4 # P
process_noise = 1e-5 # Q_k
measurement_noise = 1e-3 # R_k
def ocv(soc_coulomb_counting):
return battery_voltage_min + soc_coulomb_counting * (battery_voltage_max - battery_voltage_min)
def kalman_filter(soc_coulomb_counting, now_voltage):
predicted_uncertainty = uncertainty + process_noise
predicted_voltage = ocv(soc_coulomb_counting)
voltage_span = (battery_voltage_max - battery_voltage_min)
kalman_gain = predicted_uncertainty * voltage_span / (voltage_span * predicted_uncertainty * voltage_span + measurement_noise)
corrected_soc = soc_coulomb_counting + kalman_gain * (now_voltage - predicted_voltage)
updated_uncertainty = (1 - kalman_gain * voltage_span) * predicted_uncertainty
return corrected_soc, updated_uncertainty
for i, row in dischargetelematics_dataframe.iterrows():
if i == 0:
dischargetelematics_dataframe.at[i, "soc_kalman_filter"] = row["soc_coulomb_counting"]
else:
adjusted_soc, uncertainity = kalman_filter(row["soc_coulomb_counting"], row["Voltage"])
dischargetelematics_dataframe.at[i, "soc_kalman_filter"] = adjusted_soc
print(dischargetelematics_dataframe.head())
Visualization
Both of coulomb counting SOC and kalman filter SOC will be displayed on different line in same chart to show the differences.
dischargetelematics_dataframe["Time Stamp"] = pds.to_datetime(
dischargetelematics_dataframe["Time Stamp"]
)
import matplotlib.pyplot as plt
plt.figure(figsize=(10,5))
plt.plot(dischargetelematics_dataframe["Time Stamp"],
dischargetelematics_dataframe["soc_coulomb_counting"],
label="Coulomb Counting SOC")
plt.plot(dischargetelematics_dataframe["Time Stamp"],
dischargetelematics_dataframe["soc_kalman_filter"],
label="Kalman Filter SOC")
plt.legend()
plt.xticks(rotation=45)
plt.grid(True)
below are the visualization result
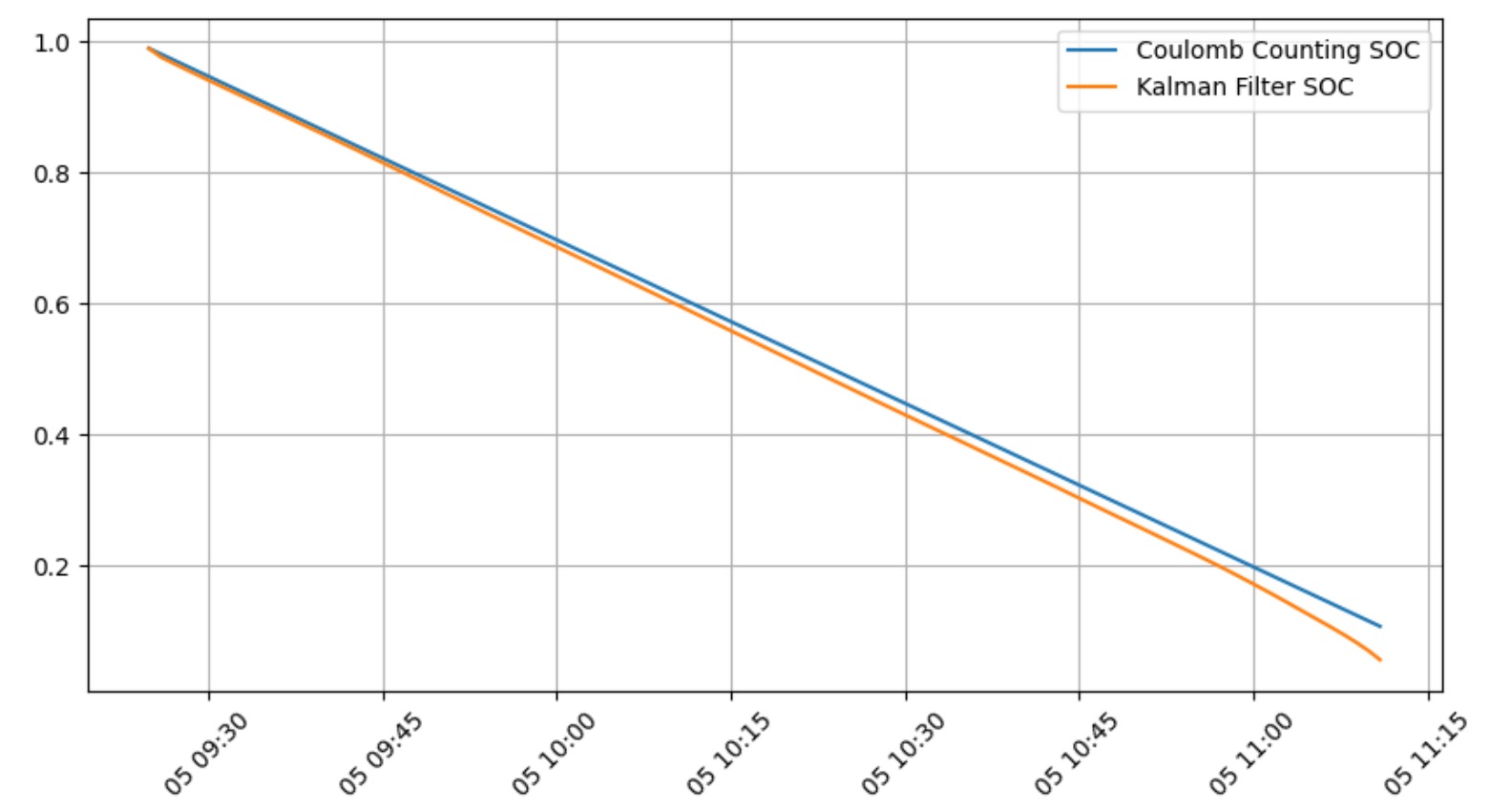 Coulomb counting SOC vs Kalman Filter SOC Result
Coulomb counting SOC vs Kalman Filter SOC Result
Jupyter notebook source code
below are the complete jupyter notebook source code
import pandas and load dataset into dataframe
import pandas as pds
battery_telematics_dataset = "./dataset/555_Dis_0p5C.csv"
battery_telematics_dataframe : pds.DataFrame = pds.read_csv(battery_telematics_dataset)
print(battery_telematics_dataframe.head())
Time Stamp Step Status ... WhAccu Cnt Unnamed: 14
0 11/5/2018 9:24:54 AM 28 DCH ... 0.71189 14.0 NaN
1 11/5/2018 9:25:54 AM 28 DCH ... 0.60916 14.0 NaN
2 11/5/2018 9:26:54 AM 28 DCH ... 0.50682 14.0 NaN
3 11/5/2018 9:27:54 AM 28 DCH ... 0.40478 14.0 NaN
4 11/5/2018 9:28:54 AM 28 DCH ... 0.30295 14.0 NaN
[5 rows x 15 columns]
Remove unncesary column and retain only discharge telematics row
cleansed_telematics_dataframe : pds.DataFrame = battery_telematics_dataframe.drop(["Step", "Status", "Prog Time","Step Time", "Cycle", "Cycle Level", "Cnt", "Procedure", "WhAccu", "Capacity", "Unnamed: 14"], axis=1)
dischargetelematics_dataframe : pds.DataFrame = cleansed_telematics_dataframe[cleansed_telematics_dataframe["Current"] < 0].reset_index(drop=True)
print(dischargetelematics_dataframe.head())
Time Stamp Voltage Current Temperature
0 11/5/2018 9:24:54 AM 4.12328 -1.49925 38.38286
1 11/5/2018 9:25:54 AM 4.10457 -1.49925 38.59318
2 11/5/2018 9:26:54 AM 4.09075 -1.49670 38.69834
3 11/5/2018 9:27:54 AM 4.07980 -1.49925 38.38286
4 11/5/2018 9:28:54 AM 4.07103 -1.49925 38.38286
coulomb counting SOC estimation
battery_cell_capacity = 3.0
sampling_time = 1/60
initial_soc = 0.99
def estimate_soc(prev_soc, current):
negated_current = -current
estimated_soc = prev_soc - (negated_current*sampling_time)/battery_cell_capacity
return estimated_soc
prev_soc = None
for i, row in dischargetelematics_dataframe.iterrows():
if i == 0:
dischargetelematics_dataframe.at[i, "soc_coulomb_counting"] = 0.99
prev_soc = 0.99
else:
now_soc = estimate_soc(prev_soc, row["Current"])
dischargetelematics_dataframe.at[i, "soc_coulomb_counting"] = now_soc
prev_soc = now_soc
print(dischargetelematics_dataframe.head())
Time Stamp Voltage Current Temperature soc_coulomb_counting
0 11/5/2018 9:24:54 AM 4.12328 -1.49925 38.38286 0.990000
1 11/5/2018 9:25:54 AM 4.10457 -1.49925 38.59318 0.981671
2 11/5/2018 9:26:54 AM 4.09075 -1.49670 38.69834 0.973356
3 11/5/2018 9:27:54 AM 4.07980 -1.49925 38.38286 0.965027
4 11/5/2018 9:28:54 AM 4.07103 -1.49925 38.38286 0.956697
Correct the estimated SOC from coulomb counting with kalman filter
battery_voltage_min = 3.7
battery_voltage_max = 4.2
uncertainty = 1e-4 # P
process_noise = 1e-5 # Q_k
measurement_noise = 1e-3 # R_k
def ocv(soc_coulomb_counting):
return battery_voltage_min + soc_coulomb_counting * (battery_voltage_max - battery_voltage_min)
def kalman_filter(soc_coulomb_counting, now_voltage):
predicted_uncertainty = uncertainty + process_noise
predicted_voltage = ocv(soc_coulomb_counting)
voltage_span = (battery_voltage_max - battery_voltage_min)
kalman_gain = predicted_uncertainty * voltage_span / (voltage_span * predicted_uncertainty * voltage_span + measurement_noise)
corrected_soc = soc_coulomb_counting + kalman_gain * (now_voltage - predicted_voltage)
updated_uncertainty = (1 - kalman_gain * voltage_span) * predicted_uncertainty
return corrected_soc, updated_uncertainty
for i, row in dischargetelematics_dataframe.iterrows():
if i == 0:
dischargetelematics_dataframe.at[i, "soc_kalman_filter"] = row["soc_coulomb_counting"]
else:
adjusted_soc, uncertainity = kalman_filter(row["soc_coulomb_counting"], row["Voltage"])
dischargetelematics_dataframe.at[i, "soc_kalman_filter"] = adjusted_soc
print(dischargetelematics_dataframe.head())
Time Stamp Voltage ... soc_coulomb_counting soc_kalman_filter
0 11/5/2018 9:24:54 AM 4.12328 ... 0.990000 0.990000
1 11/5/2018 9:25:54 AM 4.10457 ... 0.981671 0.977053
2 11/5/2018 9:26:54 AM 4.09075 ... 0.973356 0.968221
3 11/5/2018 9:27:54 AM 4.07980 ... 0.965027 0.959529
4 11/5/2018 9:28:54 AM 4.07103 ... 0.956697 0.950953
[5 rows x 6 columns]
Convert Timestmap to HH:II format and Visualize It
dischargetelematics_dataframe["Time Stamp"] = pds.to_datetime(
dischargetelematics_dataframe["Time Stamp"]
)
import matplotlib.pyplot as plt
plt.figure(figsize=(10,5))
plt.plot(dischargetelematics_dataframe["Time Stamp"],
dischargetelematics_dataframe["soc_coulomb_counting"],
label="Coulomb Counting SOC")
plt.plot(dischargetelematics_dataframe["Time Stamp"],
dischargetelematics_dataframe["soc_kalman_filter"],
label="Kalman Filter SOC")
plt.legend()
plt.xticks(rotation=45)
plt.grid(True)

